研究生课程:高级人工智能-第2讲 搜索
《高级人工智能》课程笔记:第2讲 搜索
第2讲 搜索
搜索问题:有策略有规律的探索
搜索问题是对原问题的建模
搜索问题的构成:状态空间➡后继函数(状态转化为另一个状态,采取的动作,付出的代价)➡初始状态和目标测试
解是一个行动序列,将初始状态转换成目标状态
例1:罗马尼亚旅行:
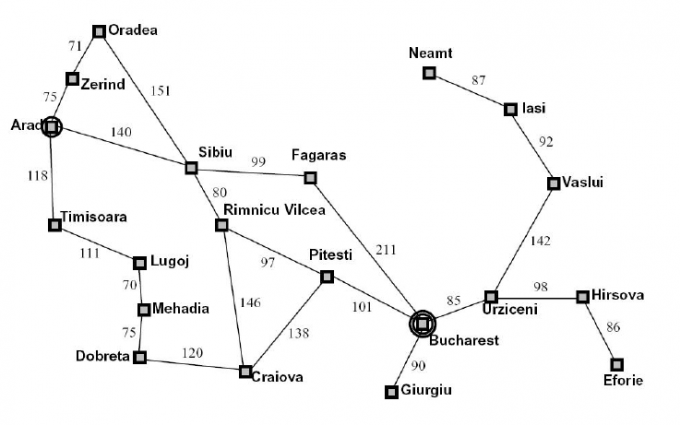
- ①状态空间:所有城市
- ②后继函数:沿着道路从一个城市到达另外一个城市,损失函数是距离
- ③初始状态:这个人现在在Arad
- ④目标测试:目前是否到达了Bucharest
解:从Arad到Bucharest的最短路径
例2:吃豆子游戏
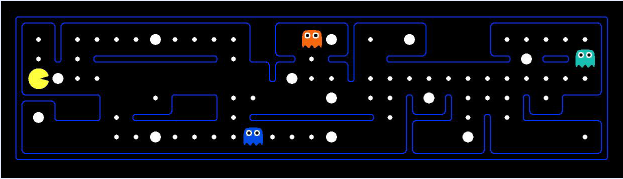
状态空间包含了环境中的每一个细节:Agent,Ghost,大的豆子和小的豆子
搜索状态只保留行动需要的细节:
对于走到终点来说:
- ①状态空间:Agent的位置信息
- ②后继函数:四个方向进行行走,更新位置信息
- ③目标测试:是否到达了终点
对于吃掉所有豆子来说:
- ①状态空间:Agent的位置信息和每一个点的状态(豆子吃没吃掉)
- ②后继函数:四个方向进行行走,更新位置信息,更新豆子的信息
- ③目标测试:全部豆子是否都被吃光
状态数量计算:
- Agent的状态:120
- 食物数量:30
- 鬼魂的位置:12*12
- 朝向:4
- 世界状态:
- 路线规划状态:120
- “吃光豆子”状态:
例3:三个传教士和三个野人
状态空间:{(M, C, B)},表示河左岸的传教士数量、野人数量和船目前的方位
后继函数:{P01, P10, P02, P20, P11, Q01, Q10, Q02, Q20, Q11},P表示现在是从左岸到右岸,后面两个数字表示船上的传教士数量和野人数量
初始状态:(3, 3, 1)
目标状态:(0, 0, 0)
状态空间图:搜索问题的数学表示,在状态空间图中,每个状态只出现一次
搜索树:
- 根节点对应了初始状态
- 子节点对应了父节点的后继
- 节点显示状态,但对应的是到达这些状态的行动
- 对大多数问题,实际上不会构建整个树,一般都会剪枝
状态空间图的每一个结点表示每一个状态
搜索树的每一个结点不表示状态,而是从初始状态到这个状态的一个路径(因此要尽量少构建搜索树的结点)
无信息搜索
基于搜索树的搜索:
- 扩展出潜在的行动 (tree nodes)
- 维护所考虑行动的边缘(fringe)节点
- 试图扩展尽可能少的树节点
搜索算法特性:
- 完备性: 当问题有解时,保证能找到一个解?
- 最优性: 保证能找到最优解(最小耗散路径)?
- 时间复杂度和空间复杂度?
所有搜索算法都是相同的,除了对边缘的处理策略
深度优先搜索
- 在找到目标之前,搜索到整个树左侧的一些子树
- 可以遍历整个树
- 分支因子为
,最大深度为
,时间复杂度为
,空间复杂度为
(因为只保留了路径上的结点)
- 完备性:不完备。如果
- 不是最优的:只去找最左边的结点
广度优先搜索
- 在找到目标之前,搜索到全部更浅的结点
- 分支因子为
,时间复杂度为
,空间复杂度为
- 完备性:完备。因为如果解存在,
- 只有所有的路径代价都相同时才是最优的
迭代深入搜索(Iterative Deepening)
结合DFS的空间优势与BFS的时间优势
深度优先按照层数进行约束,不要搜索到
通常绝大多数的节点都在底层,所以上层的节点生成多次影响不是很大
代价敏感搜索(Cost-Sensitive Search)
代价一致搜索(Uniform Cost Search):将之前的走过的路径的代价进行一个累加,然后寻找其代价最低的路径。
可以看成代价敏感搜索的一种实现。
- 在找到目标之前,搜索到比代价最小的方式更小代价的结点
- 解的代价为
,每条结点间连线的代价大概为
,时间复杂度为
,空间复杂度为
- 完备性:完备。前提是代价都是有限且都为正数。
- 最优的
启发式搜索
启发策略:估计一个状态到目标距离的函数,问题给予算法的额外信息,为特定搜索问题而设计。
贪婪搜索
策略:扩展你认为最接近目标状态的节点
启发式:对每个状态估计到最近目标的距离(曼哈顿距离或者欧氏距离),只使用启发函数
通常情况下最佳优先使你直接(或很快)到达目标,最坏情况类似DFS
A* 搜索
结合代价一致搜索和贪婪搜索
重点搜索评价函数:
A* 搜索将两个代价进行组合
A* 搜索结束条件是目标出列的时候,而不是目标入列的时候,因为目标入列的时候可能路径并不是最优的。
A*搜索不一定是最优的,启发函数要好好选择
启发函数
前提:启发函数
- 代价一致搜索在所有“方向”上等可能的扩展
- A*搜索主要朝着目标扩展,而且能够保证最优性
对于解决难的搜索问题,大部分工作就是想出可采纳的启发函数。通常可采纳启发函数是松弛问题的解的耗散
A*图搜索与树搜索的区别在于图搜索不允许访问相同结点
图搜索中,如果启发函数是一致的,A* 搜索是最优的。
一致的:启发函数不仅仅要是可采纳的,同时在每一个局部的位置也要合理。
也就是:如果沿路径的节点估计耗散
通常,天然的可采纳启发函数是倾向于一致的,特别是从松弛问题中获得的启发函数
局部搜索
树搜索在边缘集合中保留未探索的替代路径(确保完备性)
局部搜索: 改进单一选项直到不能再改善为止
爬山法搜索
模拟退火搜索:避免局部极大(允许向山下移动)
遗传算法——自然选择
- 基于适应度函数,在每步中保留N个最好状态
- 配对杂交操作
- 产生可选的变异